I. Autour d’un équilibre
1.1 Les états d’équilibres mécaniques
Pour reprendre un exemple couramment exploité dans mes cours, considérons comme système un feutre posé
sur un bureau horizontal. Si personne ne vient perturber ce feutre, il n’a aucune raison de bouger, il est donc
en équilibre mécanique. Si maintenant, quelqu’un pousse le feutre, il va se déplacer mais dès qu’on arrête de
le pousser il retrouve son équilibre sur le bureau : c’est un état d’équilibre indifférent. La situation n’est pas
toujours aussi simple, par exemple lorsque pris par l’ennui d’un cours de physique assommant les
étudiants se mettent à imaginer toutes sortes d’expériences avec leur stylos...certains tentent alors de
faire tenir un stylo (ou un blanc) à la verticale, puisque le stylo peut se maintenir dans cette
position, il s’agit d’un état d’équilibre ! la différence avec la situation précédente c’est qu’au
moindre souffle, à la moindre vibrations, le stylo quitte cet état, il tombe) et ne reviendra jamais
spontanément à la verticale : c’est un équilibre instable. Continuons encore avec ce stylo pour un
dernier exemple. Imaginez que vous n’ayez qu’un seul stylo dans votre trousse(pour les enseignants
c’est souvent le rouge !). Lorsque vous vous déplacez, le stylo fait des va et vient au fond de
la trousse, comme une bille au fond d’une cuvette, et à chaque fois que vous vous arrêtez, le
stylo revient toujours à la même position : au fond de la trousse : cet état d’équilibre est appelé
équilibre stable. Au cours de ce chapitre, c’est l’état d’équilibre stable qui va le plus nous intéresser
et les questions majeures auxquelles vous devrez répondre sont les suivantes : Que se passe-t-il
lorsqu’on perturbe un état d’équilibre stable ? Pourquoi et comment le système revient-il vers cet
état ?
1.2 Interprétation
Pour comprendre ce qui se passe dans les exemples précédents, il faut se rappeler de l’énergie potentielle :
c’est cette grandeur qui caractérise l’énergie qu’un objet possède du fait de sa position et des forces qui lui
sont appliquées. Ici, la seule force à prendre en considération est la force d’interaction gravitationnelle et
l’énergie potentielle du feutre ou du stylo est l’énergie potentielle de pesanteur Ep(z) = mgz. Dans le cas
d’un équilibre indifférent, un déplacement du feutre autour de sa position initiale n’induit pas de variation de
l’énergie potentielle de pesanteur (le bureau étant supposé bien horizontal). Dans le cas d’un
équilibre instable, un déplacement du feutre induit une diminution de l’énergie potentielle du
feutre. Et oui lorsque le feutre est incliné, son centre de gravité est plus bas, donc son énergie
potentielle de pesanteur plus faible, ainsi l’énergie potentielle du feutre est maximale dans la position
d’équilibre instable. Enfin vient l’état d’équilibre stable. Tout déplacement du système autour de
cette position induit une augmentation de l’énergie potentielle si bien que le système va avoir
tendance à retourner dans sa position initiale (d’équilibre stable) où l’énergie potentielle est
minimale..
Et je vous entend déjà venir, ”il nous a fait tout un paragraphe à dire, un système ne bouge que si il est
soumis à un ensemble de forces non nul et puis là, d’un coup le système revient à l’équilibre
pour diminuer son énergie potentielle ! elles est où la force ? ?” Et c’est vrai, le système ne peut
se mettre en mouvement que si il est soumis à une force, c’est la relation fondamentale de la
dynamique ! Alors voici le moment où nous abandonnons le feutre sur la table, la bille au fond de la
cuvette et où nous généraliserons le problème. Dans toute la partie sur les oscillations libres, nous
supposerons que le système est soumis à des forces conservatives, c’est à dire des forces qui
ne provoquent pas de perte d’énergie mécanique du système. or toute force conservative, qu’il
s’agisse de force de pesanteur ou de force de rappel d’un ressort dérive d’un potentiel et on peut
écrire :
 | (1) |
Cette relation permet de dégager deux caractéristiques essentielles des forces conservatives :
- La force sera perpendiculaire aux surface équipotentielle (propriété du gradient)
- La force est dirigée vers les surface d’énergie potentielle faibles, c’est ce qui explique que le
système tend à se déplacer vers le minimum d’énergie potentielle !
Si cette expression vous semble barbare, prenons un petit exemple pour que vous ayez les idées bien fixées. Si
vous considérez l’énergie potentielle de pesanteur, en prenant pour origine des potentiels la surface du sol
définie par la cote z=0 d’un axe Oz orienté vers la verticale ascendante. Les surfaces équipotentielle dans une
salle de cours sont des plans parallèles au sol et plus un point est placé haut dans la salle plus son énergie
potentielle est grande, les coordonnées x et y ne changent en rien le problème . Il en découle de tout ceci une
force conservative :

Et vous reconnaissez là l’expression du poids  .
.
Vous voilà donc convaincu du lien entre l’énergie potentielle et la force, poursuivons donc le
chapitre et tentons de décrire le mouvement d’un système autour de sa position d’équilibre
stable...
2 Oscillations libres
2.1 Un exemple: force de rappel d’un ressort
Bien que le calcul général puisse être fait, nous prendrons ici un exemple courant qui sert souvent
à modéliser le mouvement d’un système autour de sa position d’équilibre : la force de rappel
d’un ressort. On considère une masse, m, attachée à l’extrémité d’un ressort de constante de
raideur, k, l’autre extrémité du ressort étant maintenue fixe. La masse peut se déplacer sans
frottements sur un axe horizontal Ox défini par le vecteur unitaire  . La situation est résumée figure
3.
. La situation est résumée figure
3.
A l’équilibre, la masse est à la position xeq = Leq, son énergie potentielle élastique est bel et bien
minimale (elle est nulle !), en effet l’énergie potentielle élastique est donnée par :
 | (2) |
La force de rappel du ressort étant quant à elle donnée par :
 | (3) |
En vue d’alléger les notation on peut faire un petit changement de variable, et on notera

l’expression de la force sera ainsi :
 | (4) |
Vous avez maintenant le cahier des charges et les outils, ne reste plus qu’à construire le bâtiment...
2.2 Équation du mouvement
Pour établir l’équation du mouvement, nous allons appliquer la Relation Fondamentale de la Dynamique au
système masse dans un référentiel galiléen et dans le repère cartésien ramené à une seule dimension tel que
décrit sur la figure 3.

La seule force appliquée au système est la force de rappel du ressort (4), on peut donc écrire :

Cette équation n’a aucun intérêt sur les axes Oy et Oz (on obtient y=cte et z=cte) projetons-la sur l’axe Ox
en notant que ax =  , on obtient alors :
, on obtient alors :

Équation qui peut aussi s’écrire :
 | (5) |
L’équation 5 porte le nom d’équation de l’oscillateur harmonique. Il s’agit d’une équation différentielle
d’ordre 2 à coefficients constants ; le discriminant de son équation caractéristique étant négatif (Δ = -4 )
la solution est du type :
)
la solution est du type :

Solution qui peut s’écrire avec lformule d’Euler :

Soit en rassemblant les termes en cosinus et ceux en sinus :

La vitesse initiale étant nulle, la dérifée f′(t) doit être nulle, et on en déduit A2 = 0, la solution de
l’équation est donc finalement :
 | (6) |
Il s’agit d’un mouveemnt d’oscillation d’amplitude A1 et de pulsation ω0 =  soit de période :
soit de période :

On dit qu’il s’agit de la période propre de l’oscillateur harmonique. C’est avec cette période que la masse va
effectuer des allers-retours indéfiniment, car selon notre modèle, elle ne s’arrêtera jamais... un peu utopique
non ?
3 Retour à l’équilibre
3.1 Les frottements, un phénomène dissipatif
Pour retrouver un comporteent réel, il faut introduire un phénomène de dissipation de l’énergie dans notre
modélisation. Ce phénomène n’est autre que les frottements. Ceux-ci réalisent le transfert de l’énergie
mécanique en énergie thermique, c’est un facteur d’irréversibilité des transformations et c’est
justement à cause de cela qu’ils sont aussi les garants d’une modélisation réelle des phénomènes. Il
existe cependant diverses catégories de frottements, et leurs études fera l’objet d’un chapitre
entier. Pour l’heure nous nous limiterons à la description la plus simple des frottements : les
frottements fluides. On supposera ainsi que nous avons placé la masse sur un rail contenant de
l’huile, la vitesse de déplacement de cette masse étant faible, la force de frottement prend alors la
forme :
 | (7) |
Le coefficient α est caractéristique des dimensions de la masse et de la viscosité du fluide avec lequel elle est
en contact.
Muni de cette expression, nous allons reprendre l’étude du mouvement de la masse éloignée de sa position
d’équilibre.
3.2 Équation du mouvement
Pour obtenir l’équation du mouvement,il faut encore appliquer la relation fondamentale de la dynamique. On
obtient ainsi après projection sur l’axe Ox :

Ce qui peut se mettre sous la forme :
 | (8) |
Il s’agit encore d’une équation différentielle d’ordre 2 à coefficient constant mais cette fois-ci le
déterminant de l’équation caractéristique n’est pas toujours négatif, il est donné par :
 | (9) |
C’est le signe de ce discriminant qui imposera les différents régimes d’oscillations...
3.3 Les régimes d’oscillations
Trois cas peuvent se présenter en ce qui concerne le discriminant :
- Le discriminant est négatif
- Le discriminant est nul
- Le discriminant est positif
3.3.1 Le régime pseudo-périodique (Δ < 0)
Le discriminant est négatif si :

ce qui revient à dire si :
 | (10) |
Cela correspond à un coefficient de frottement, α, qui doit être inférieur à une certaine valeur, si les
frottements sont faibles, en général, cette condition est satisfaite. Il faut donc s’attendre dans ce cas à des
oscillations proches de celles vu dans le paragraphe précédent, d’où le nom de ce régime : Le régime
pseudo-périodique . Cette intuition mérite cependant vérification, et pour cela, il faut résoudre l’équation
différentielle...
Lorsque le discriminant est négatif, les deux racines complexes conjuguées de l’équation caractéristiques
sont :
La solution de l’équation différentielle est donc de la forme :

Solution que nous pouvons réarranger quelque peu :
X(t) = C1.e t.e-i
t.e-i t + C
2.e
t + C
2.e t.ei
t.ei t
t
Soit en faisant apparaitre les fonctions cosinus et sinus :
X(t) = (C1 + C2).e tcos
tcos + i.sin
+ i.sin (C1 - C2).e
(C1 - C2).e t
t
Une fois encore, la vitesse initiale sera prise nulle, ce qui permet d’obtenir C1 = C2 et la solution finale sera
donnée par l’équation ??.
 | (11) |
On voit que l’amplitude des oscillations (A) est modulée par une fonction exponentielle décroissante au
cours du temps ce qui justifie que les frottements sont responsables du retour à l’équilibre du
système.On peut tracer qualitativement la fonction X(t) et on obtient le graphe de la figure
4.
On retrouve bien sur la figure 4 le comportement que nous attendions d’un point de vue
”logique”.
3.3.2 Le régime apériodique (Δ > 0)
Le discriminant est positif si :

ce qui revient à dire si :
 | (12) |
Ce cas de figure correspond donc à un coefficient de frottement élevé, or si ce coefficient est très élevé on
peut s’attendre à peu voir, pas d’oscillations, voyons ce que nous donne la résolution de cette équation
différentielle...
Lorsque le discriminant est négatif, les deux racines complexes conjuguées de l’équation caractéristiques
sont :
La solution de l’équation différentielle est donc de la forme :

Ce qui s’écrit plus communément sous la forme :

La fonction X(t) prend alors l’allure présentée par la figure 5.
On constate sur ce graphique que les oscillations ont disparues, les frottements sont suffisamment élevés
pour permettre un retour rapide de la masse à l’équilibre, on ne peut plus définir de période d’où le terme
apériodique, définissant ce régime.
3.3.3 Le régime critique (Δ = 0)
C’est le cas limite entre les deux situations rencontrées précédemment, on pourrait dire que dans ce cas, les
effets des frottements et de la force de rappel sont de même intensité. Les résultats sont difficiles à prévoir
d’instinct cette fois-ci et il vaut mieux se fier aux résultats surs, fournis par la résolution mathématiques de
l’équation différentielle.
Lorsque le discriminant est nul, il n’y a qu’une seule racine au polynôme caractéristique et elle est donnée
par :

La solution de l’équation différentielle est donc de la forme :

la fonction X(t) prend alors l’allure décrite par la figure 6
La courbe ressemble fortement à celle du régime apériodique, on n’observe pas d’oscillations.
La différence se situe dans le temps nécessaire pour obtenir une amplitude nulle :le retour à
l’équilibre se fait bien plus rapidement dans le cas du régime critique que dans le cas du régime
apériodique.
3.4 Applications
Quel est l’intérêt d’étudier un tel phénomène, une bille au fond d’une cuvette ça n’amuse personne alors
autant de calcils pour expliquer qu’elle va faire des allers-retours... La réponse est dans le petit paragraphe
sur les forces conservatives, le poids en est une, la force de rappel d’un ressort aussi, mais il y en a bien
d’autres comme l’interaction électrostatique qui maintient les électrons à proximité du noyau. Et c’est parce
que le problème traité ici ne se résume pas à la seule force de rappel d’un ressort que les applications qui en
découlent sont grandes.
Par exemple, dans tous les instruments de mesures analogiques (voltmètre ou galvanomètre), chaque
variation de la grandeur mesurée perturbe l’équilibre de l’aiguille indicatrice. Si le retour de l’aiguille à une
position d’équilibre (nouvelle à priori) se fait après un nombre très grand d’oscillations la mesure peut
devenir quelque peu pénible. Aussi, tous ces instruments sont idéalement conçus pour fonctionner dans le
régime critique, au pire des cas dans le régime apériodique !
Autre exemple. Les casques de pilotes ne doivent pas se mettre à osciller sur la tête du pilote lors d’un
choc ce qui pourrait provoquer des troubles physique sévères de celui-ci. On étudie donc l’assemblage de ces
casques de sorte à proscrire toute apparition d’un régime périodique. Ainsi l’amplitude du choc diminuera
rapidement et le casque joue son rôle !
Nous avons parlé ici d’une perturbation limitée dans le temps du système, une autre manière de
perturber le système c’est de lui appliquer une contrainte périodique, ou du moins plus longue que celle
évoquée ici, l’étude qu’il nous faudra faire est alors l’étude de la résonance...



.gif) .
A partir de ce point, la position de d'un point se déplaçant dans l'espace sera caractérisé par un seul objet le vecteur position défini par :
.
A partir de ce point, la position de d'un point se déplaçant dans l'espace sera caractérisé par un seul objet le vecteur position défini par :
.gif)
.gif)
.gif)
.gif)
.gif)
.gif) :
:
.gif) est un vecteur radial, il est porté par le 'rayon' et centrifuge
est un vecteur radial, il est porté par le 'rayon' et centrifuge.gif) est un vecteur orthoradial, perpendiculaire au premier
est un vecteur orthoradial, perpendiculaire au premier
.gif)
.gif) tournent, ils ne sont donc pas indépendant du temps!! Et c'est pour cela qu'il faudra faire bien attention à l'expression de la vitesse...
tournent, ils ne sont donc pas indépendant du temps!! Et c'est pour cela qu'il faudra faire bien attention à l'expression de la vitesse...
.gif) Finalement la vitesse dans les coordonées polaires s'écrit :
Finalement la vitesse dans les coordonées polaires s'écrit :
.gif)
 ) est le vecteur unitaire qui lui est directement perpendiculaire.
) est le vecteur unitaire qui lui est directement perpendiculaire.
.gif)
.gif)
.gif)
.gif) . Le repère cylindrique permet donc de repérer aisément un point situé à la surface d'un cylindre.
. Le repère cylindrique permet donc de repérer aisément un point situé à la surface d'un cylindre.

.gif)
.gif) :
:
.gif)
.gif)
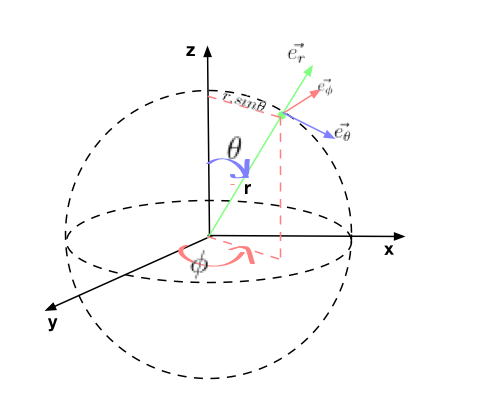
 Ce repère comporte donc trois vecteurs unitaires qui bougent tous avec le point M étudié
Ce repère comporte donc trois vecteurs unitaires qui bougent tous avec le point M étudié .gif) , le vecteur radial ;
, le vecteur radial ; .gif) et
et .gif)
.gif) a donc l'expression suivante :
a donc l'expression suivante :
.gif)
.gif) lorsque le point M se déplace légèrement:
lorsque le point M se déplace légèrement:
.gif)
.gif)
.gif) n'est pas égale à
n'est pas égale à .gif) !! Il en va de même pour les autres vecteurs de la base sphérique :
!! Il en va de même pour les autres vecteurs de la base sphérique :
.gif)
.gif)
.gif)
.gif)
.gif)